Andrea F. DanieleRobotics Engineer • Computer Engineer • Computer ScientistI am a Robotics Engineer, and I am interested in developing robots that are able to move autonomously in unstructured environments and work alongside people. I currently work on the Atlas team at Boston Dynamics, Inc. Before that, I served as Chief Technology Officer at Duckietown, Inc. I received my Ph.D. in Computer Science from the Toyota Technological Institute at Chicago (TTIC), a philanthropically endowed academic computer science institute located on the University of Chicago campus. I was a member of the Robot Intelligence through Perception Laboratory (RIPL) where I worked under the supervision of Prof. Matthew Walter. During my Ph.D., my research focused mainly on human-robot cooperation and coordination based on natural language interaction as well as fleet-level robot-robot communication and coordination in the development of smart cities and self-driving vehicles. I received a Master's Degree in Artificial Intelligence and Robotics from the University of Rome - ”La Sapienza”, (Italy), where I worked under the advisement of Prof. Daniele Nardi. I received a Bachelor’s Degree in Computer Engineering from the University of Calabria - UNICAL (Italy). Work Experience
Education
Portfolio
Roles: Lead Architect Main DeveloperCurrent Owner / License: Duckietown, Inc.The Duckiematrix is a high-performance robot simulator for the Duckietown platform that allows for the simulation of large fleets of robots in real-time. It is based on the Unity game engine. The Duckiematrix supports the concurrent simulation of multiple robots, such as ground vehicles, drones, smart city infrastructure, and all their sensors and actuators. It is also designed to support the use of multiple renderers to distribute the rendering load across multiple GPUs or nodes across the network. Learn more from the official documentation. 
Roles: Project LeaderCurrent Owner / License: Duckietown, Inc.The DD24 autonomous drone is a state-of-the-art educational platform by Duckietown, Inc. With the DD24, we wanted to create a drone that was easy to use, program, debug, and understand. At the same time, we wanted a drone that was powerful enough to be used in advanced robotics courses and research projects. Compared to its predecessor, the DD21, the DD24 is 36% more powerful, 30% smaller, has 3x the number of sensors, and new obstacle detection capabilities with 270deg coverage. Learn more from the official documentation. 
Roles: Lead Architect Main DeveloperCurrent Owner / License: Duckietown, Inc.The Interactive Robot Assembly Tool is a web-based tool that allows users to assemble physical robots while following the step-by-step assembly process in 3D. The view can be rotated, zoomed, and panned to provide a better understanding of all the steps that make up the assembly process. The Interactive Robot Assembly Tool is based on the Unity game engine. This provides a photo-realistic rendering engine in which high-fidelity 3D models of the robot components can be used. Learn more from the official video and live example. 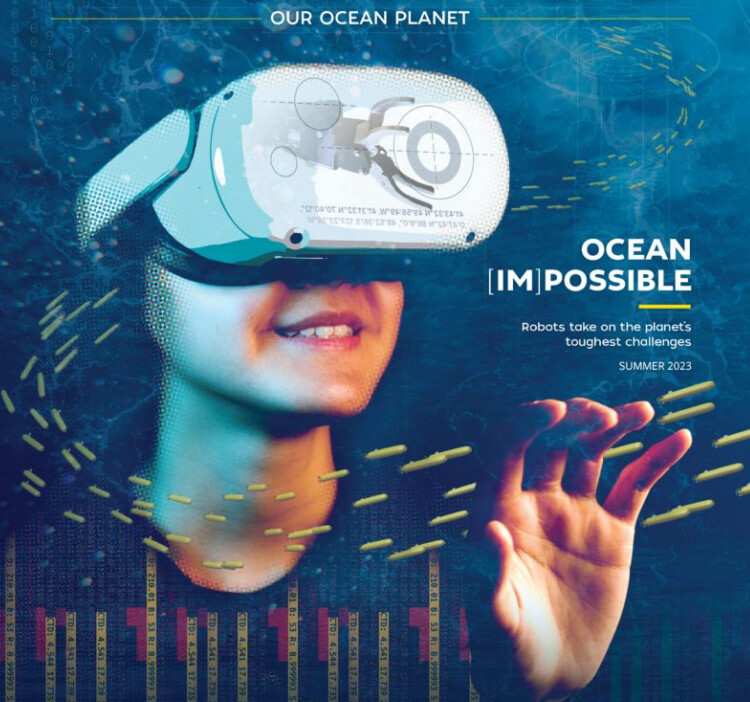
Roles: Co-InventorCurrent Owner / License: PatentedConventional underwater intervention operations using robotic vehicles require expert teleoperators on a support vessel deployed nearby the intervention site. SHARC (SHared Autonomy for Remote Collaboration) is a framework that enables operators to cooperatively conduct robotic underwater sampling and manipulation tasks from thousands of miles away. With SHARC, operators can execute manipulation tasks using natural language or hand gestures through a virtual reality interface. SHARC is readily extensible to other tasks and domains such as planets exploration. Learn more from our scientific publication or the project page. 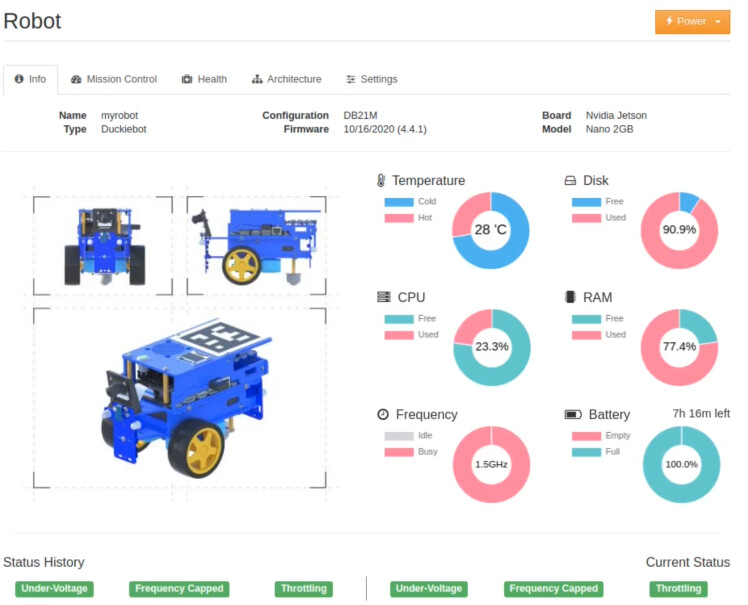
Roles: Lead Architect Main DeveloperCurrent Owner / License: Duckietown, Inc.The Duckietown Dashboard is a browser-accessible control center and robot data visualizer for the Duckietown platform. I started the development of the Dashboard in 2017 as a tool to help students and researchers to interact with the Duckietown robots in a more intuitive way. It is now a key component of the Duckietown platform and is used by thousands of users worldwide. The Duckietown Dashboard is created using the \compose\ framework. Learn more from the official documentation.
Roles: Lead Architect Main DeveloperCurrent Owner / License: MIT LicenseWhile Virtual Machines are a powerful tool for isolated deployments, they are often too heavy to justify their use for simple applications. The Almost A Virtual Machine (aavm) is a lightweight alternative to full-blown VMs that allows you to run applications in sandboxed environments with minimal overhead.
aavm uses Docker containers configured with an isolated instance of Learn more from the official GitHub repository.
Roles: Lead Architect Main DeveloperCurrent Owner / License: MIT License\compose\ is an open-source web-based CMS platform that provides all the functionalities needed for the fast development and deployment of web applications. In particular, it focuses on the development of web applications that require real-time data visualization and interaction. This makes it the ideal framework for the development of robot telemetry dashboards and control centers. An example use case is the Duckietown Dashboard. \compose\ is written in PHP and designed to be lightweight, modular, and easy to use. Learn more from the official GitHub repository.
Roles: Lead Architect Main DeveloperCurrent Owner / License: MIT Licensecpk stands for Code Packaging toolKit and is designed to standardize the way code in a project is structured and packaged for maximum portability, readability and maintainability. cpk is the result of years of experience in cross-user, cross-machine, cross-architecture development and deployment of software modules. cpk organizes code in projects. A cpk project is a directory containing everything that is needed for the project to be built, packaged, documented and deployed. An easy-to-use command-line interface is provided to manage the project. It leverages the power of Docker to provide consistent and reproducible, yet dynamic development and deployment environments. Learn more from the official GitHub repository. Events
Some of my open-source contributions were selected for archival in the
Arctic World Archive (AWA),
an archival facility designed to preserve data for 1,000 years.
I worked on the development of "SHARC: SHared Autonomy for Remote Collaboration" at the Woods Hole Oceanographic Institution. SHARC is a multi‑modal interface that enables remote scientists to perform high‑level tasks using an underwater manipulator, while deferring low‑level control to the robot. We successfully deployed and tested SHARC during the OECI Technology Demonstration: Nereid Under Ice (NUI) Vehicle + Mesobot expedition aboard E/V Nautilus.
I co-organized the first hardware based massive online open course (MOOC) in AI and robotics, free on edX. Aimed at teaching autonomy hands-on by making robots that can take their own decisions and accomplish broadly defined tasks. The course guides learners step-by-step from the theory, to the implementation, to the deployment in simulation as well as on real robots (Duckiebots).
Leveraging static annotations and HD maps, we created a semantically rich lane-level graph, that simulated agents can use to navigate the map. This lane graph is comprised of three layers: topological, metrical, and semantic. Topological and metrical layers were extracted from HD maps and static annotations, while the semantic layer was constructed from annotations only.
Together with my adviser Prof. Matthew Walter, Jacob Arkin, Nakul Gopalan, Prof. Thomas Howard, Jesse Thomason, and Lawson Wong, I organized the Workshop on Models and Representations for Natural Human-Robot Communication (MRHRC) at the RSS (Robotics: Science and Systems) 2018 conference.
Under the supervision of my adviser Prof. Matthew Walter, I and other colleagues showed our UR5-equipped Husky A200 robot safely playing Checkers against human opponents at the Museum of Science and Industry in Chicago for the 2018 National Robotics Week exhibit. This robot is developed in the RIPL lab at TTI-Chicago.
In Autumn 2017 I joined the international team of Duckietown (a robotics education and outreach effort) working as a Teaching Assistant for the course TTIC 31240 - Self-driving Vehicles: Models and Algorithms for Autonomy taught by Prof. Matthew Walter at TTIC. Click on the blue button to see my contributions to the project.
Under the supervision of my adviser Prof. Matthew Walter, I and other colleagues showed our Husky A200 robot at the Museum of Science and Industry in Chicago for the National Robotics Week. This robot is developed in the RIPL lab at TTI-Chicago as part of the Robotics Collaborative Technology Alliance (RCTA) research program. CBS 2’s Vince Gerasole interviewed me on that occasion.
Under the supervision of my adviser Prof. Matthew Walter, I developed a model that enables robots to generate natural language instructions that allow humans to navigate a priori unknown environments. The model first decides which information to share with the user according to their preferences, then “translates” this information into a natural language instruction. Publications
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||


