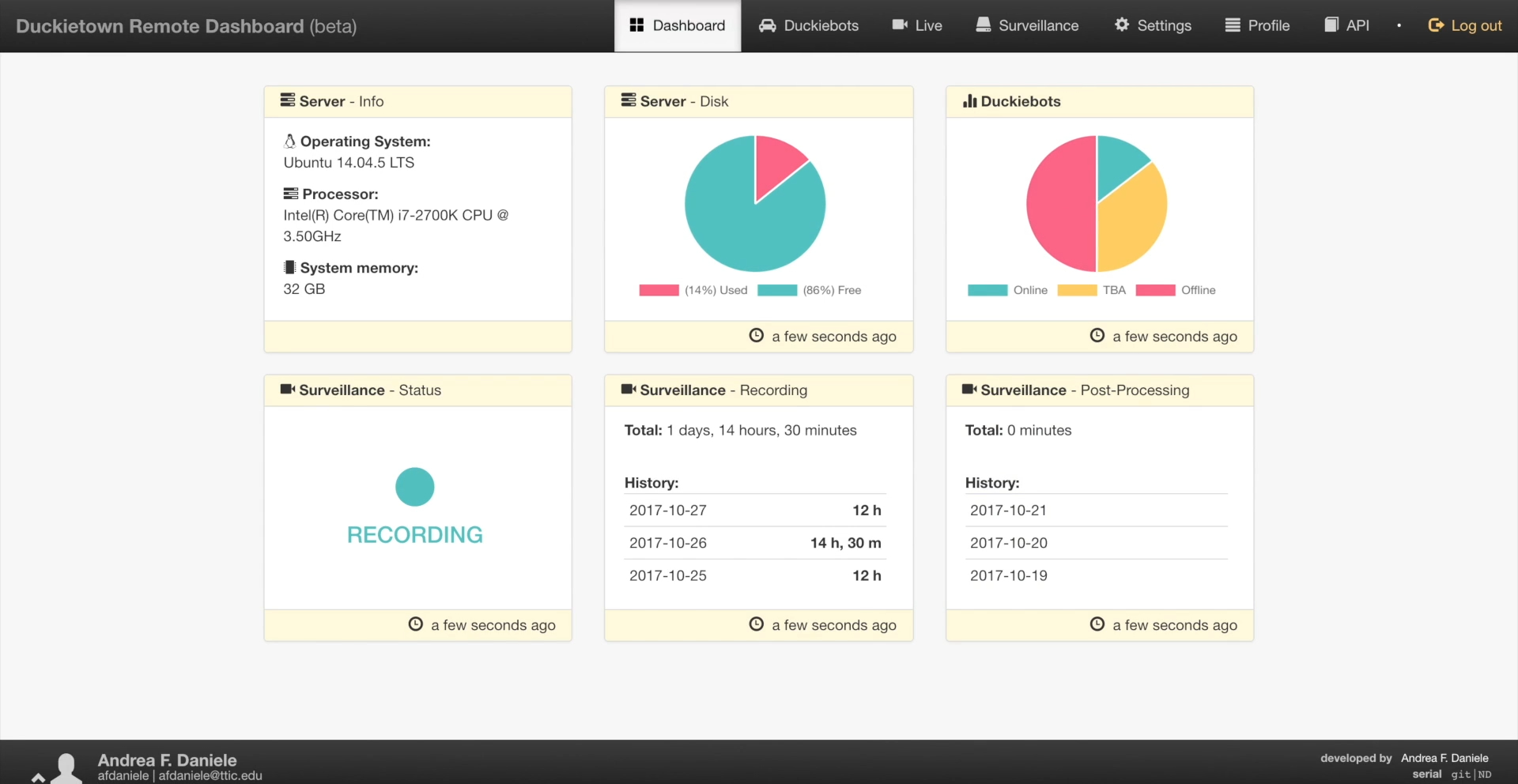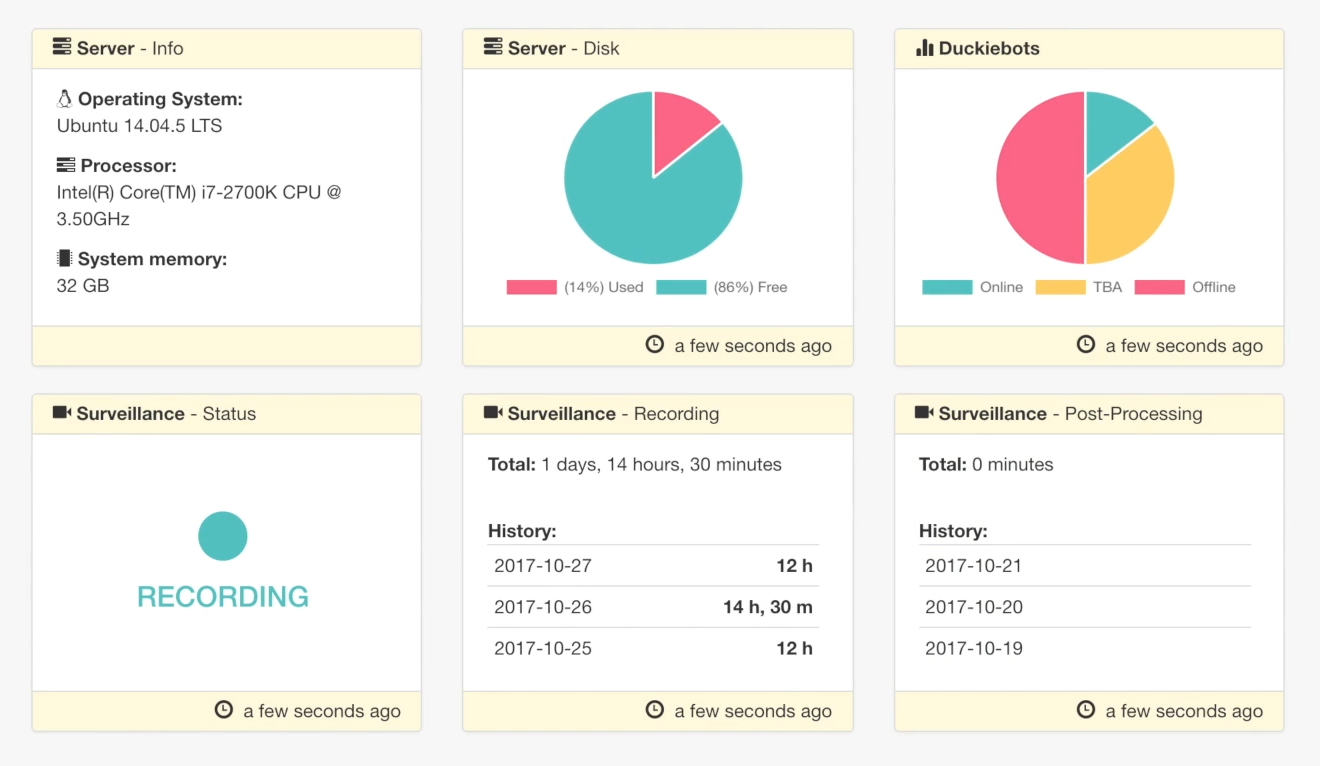
Main page of Duckieboard.
I started developing the Duckietown Dashboard (
Duckieboard,
of course) in November 2017. After two months of development, I decided to
separate the codebase in two parts: one containing all the functionalities common
to any web-based CMS, and another one containing those that were specific for
Duckietown. The common libraries developed for supporting the Duckieboard later
became
\compose\, an open-source web-based
CMS platform that provides all the funcionalities for the fast development and deployment of
web applications.
\compose\ is actively maintained and
available on
GitHub.com.
Today,
Duckieboard is an open-source package
installable on any instance of the
\compose\ platform.
This is a wormhole to the GitHub repository containing the code for
the \compose\ package that implements the Duckieboard.
For a better experience, visit the repository on the
official GitHub repository.
The code is released under the GNU GPL v3
license. Feel free to copy, extend, contribute, and redistribute the code.