SHARC: SHared Autonomy for Remote Collaboration at WHOI
Together with a team of students, professors, and researchers from the
the Woods Hole Oceanographic Institution,
MIT, and
TTIC,
I worked on the development of SHARC: SHared Autonomy for Remote Collaboration.
SHARC consists of four parts:
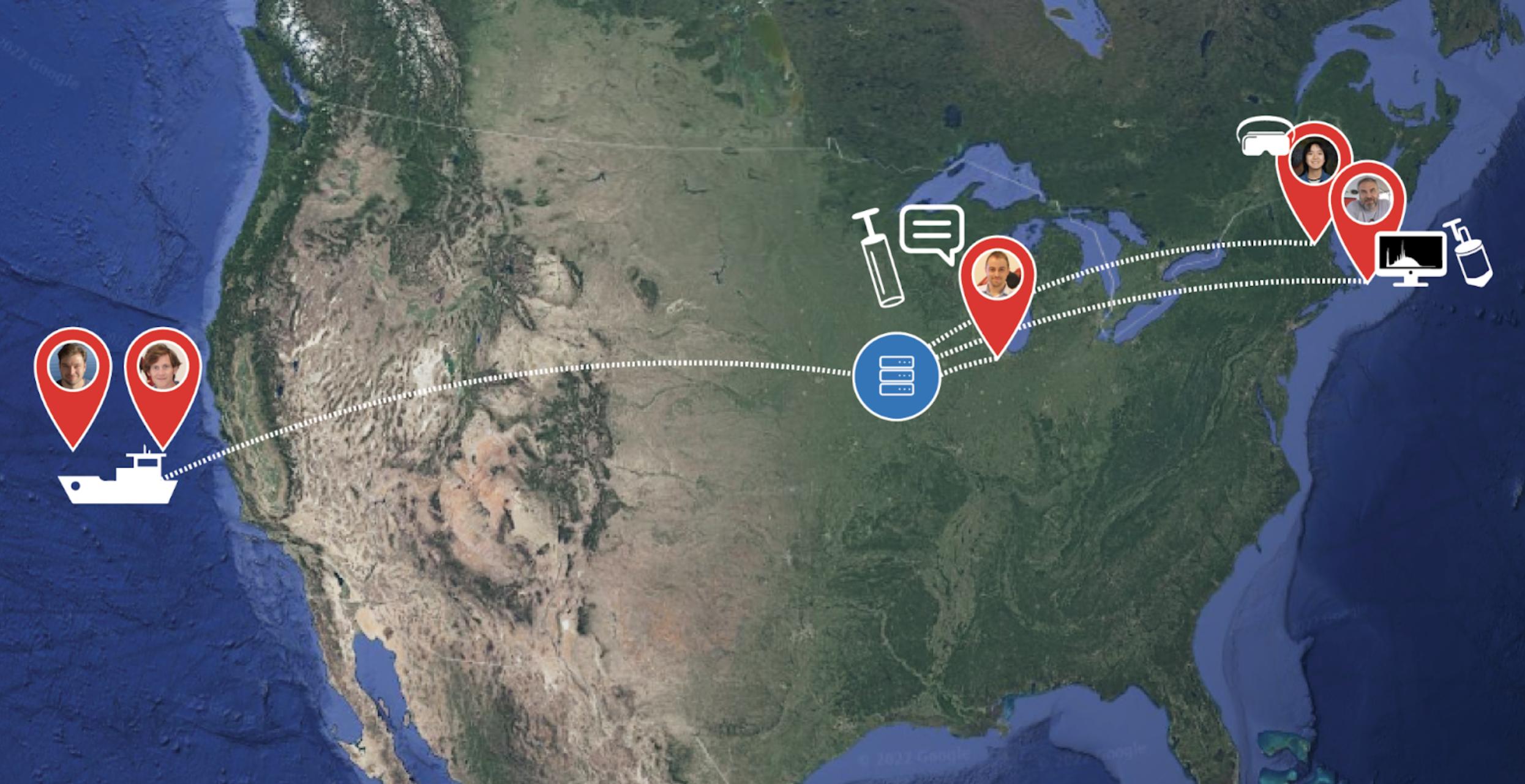
The data from the robot is streamed up to the ship via a fiber optic cable. The pilot onboard the ship chooses which data streams to forward onto the shore-side server, which distributes the data to the on-shore users that are connected to it. Distributing the data through a central on-shore server, allows us to (i) support multiple users logged in simultaneously, (ii) support multi-user operations where scientists with different skills and field of experise can cooperatively perform a complex task, and (iii) render the bandwidth requirements on the connection link between the ship and the shore independent on the number of connected users. The pilot can also choose if and who (among the users connected) can command the robot. Robot monitoring and control is condensed into a single 3D multi-modal user interface. SHARC's UI features a natural language interface for hands-free interaction, classical 3D viewers available for Linux, MacOS, and Windows, VR headset and controllers for immersive experience. Cruise
We successfully deployed and tested SHARC during the
OECI Technology Demonstration: Nereid Under Ice (NUI) Vehicle + Mesobot
expedition aboard E/V Nautilus.
During this expedition, three on-shore scientists, myself (in Chicago, IL), MIT's student
Amy Phung (in Boston, MA), and
WHOI's Professor Richard Camilli
(in Woods Hole, MA), orchestrated the execution of an in-situ XRF (X-Ray Fluorescense)
sampling as well as a pushcore sampling on the sea floor of the Pacific Ocean off the
coast of Southern California, at a depth of about 1000 meters.
Two scientists aboard the ship, TTIC's
Professor Matthew Walter, and
UMICH's Ph.D. Candidate
Gideon Billings served as
pilots.
When: September 15 - 30 2021Where:MediaOpinions
|